内层的带宽一定大于外层的带宽,否则整个控制系统为不稳定系统,会造成系统震荡。所以,以上三个环路的带宽关系为:
位置和速度带宽的选择是否合适是由机械的刚性和现场应用场合决定的,一般的应用场合,调整惯量比和刚性即可达到现场的响应和定位要求。
直接驱动滚珠丝杠的机械负载刚性较高,可设置为较大带宽,刚性一般大致为14~17,例如:机床、贴片机等进行高精度加工机械;
如果惯量比和刚性调整后,依然无法达到现场的应用要求,需要对位置环和速度环的参数一一进行微调时,但需要注意的是,如果改变其中一个参数,则其他参数也需要重新调整,请不要对某一个参数做较大额的更改。一般可遵循以下步骤:
降低伺服响应

位置控制1、 设定合适的转动惯量比;
3、 加大速度环增益,如果机械振动,稍许调小;
5、 增大位置环增益,如果机械振动,稍许调小;
7、 若需要更短的定位时间和更小的位置跟踪误差,可适当增加速度前馈,即速度前馈增益,但不宜超过80%;
的增益调整步骤如下:
2、设定速度环积分时间常数为较大值;
4、减小速度环积分时间常数,如果机械振动,稍许调大;
速度环增益:
速度环带宽(Hz) = (1+G)/(1+J/J)*速度环增益(Hz)
LMLM速度环积分时间常数:
LM速度环积分时间常数(ms) = 4000/(2*pi*速度环增益(Hz))位置环增益:
位置环带宽(Hz) <= 速度环带宽(Hz)/4
LM位置环增益(1/s) <= 2*pi*速度环增益(Hz)/4
低通滤波器对高频有很好的衰减,能较好的抑制高频震荡和噪声,但对中低频共振无抑制作用。例如丝杠连接负载时,增加刚性可以提高系统响应,当提高到一定程度时,有时会发生高频共振,电流发生震荡,使用转矩低通滤波器会有较好的效果。
陷波器:
如果共振频率是随着时间或其他因素偏移的,且偏移范围较大,则陷波器不适用。
确定接线方式
Pr4.10为驱动器报警输出,当410参数设置为0101时,正常输出电压为0V,报警输出为24V,当多个驱动器报警点并联时,测得输出为0V,不能反映报警状态。
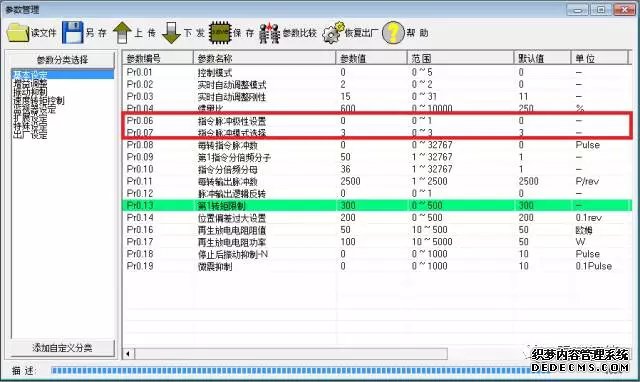
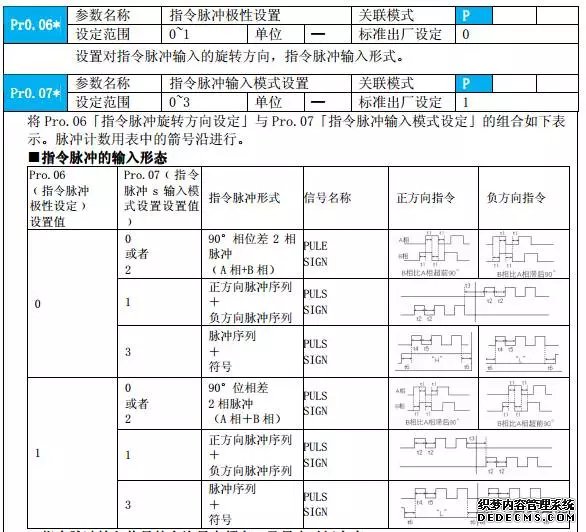
确定脉冲输入方式,确定参数Pr0.06和Pr0.07
驱动器面板监控参数D16可以显示负载惯量。测试方法:
设备刚性
刚性调整如下:
第1增益和第2增益的切换按照参数Pr1.15设置:

电子齿轮比
驱动器默认脉冲数为10000,当实际脉冲数为10000时,两个参数都为1
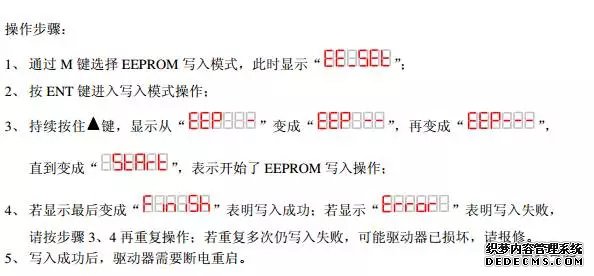
面板操作方法

<span font-size:12px;"="">参数保存操作步骤: